Hands-On RL#
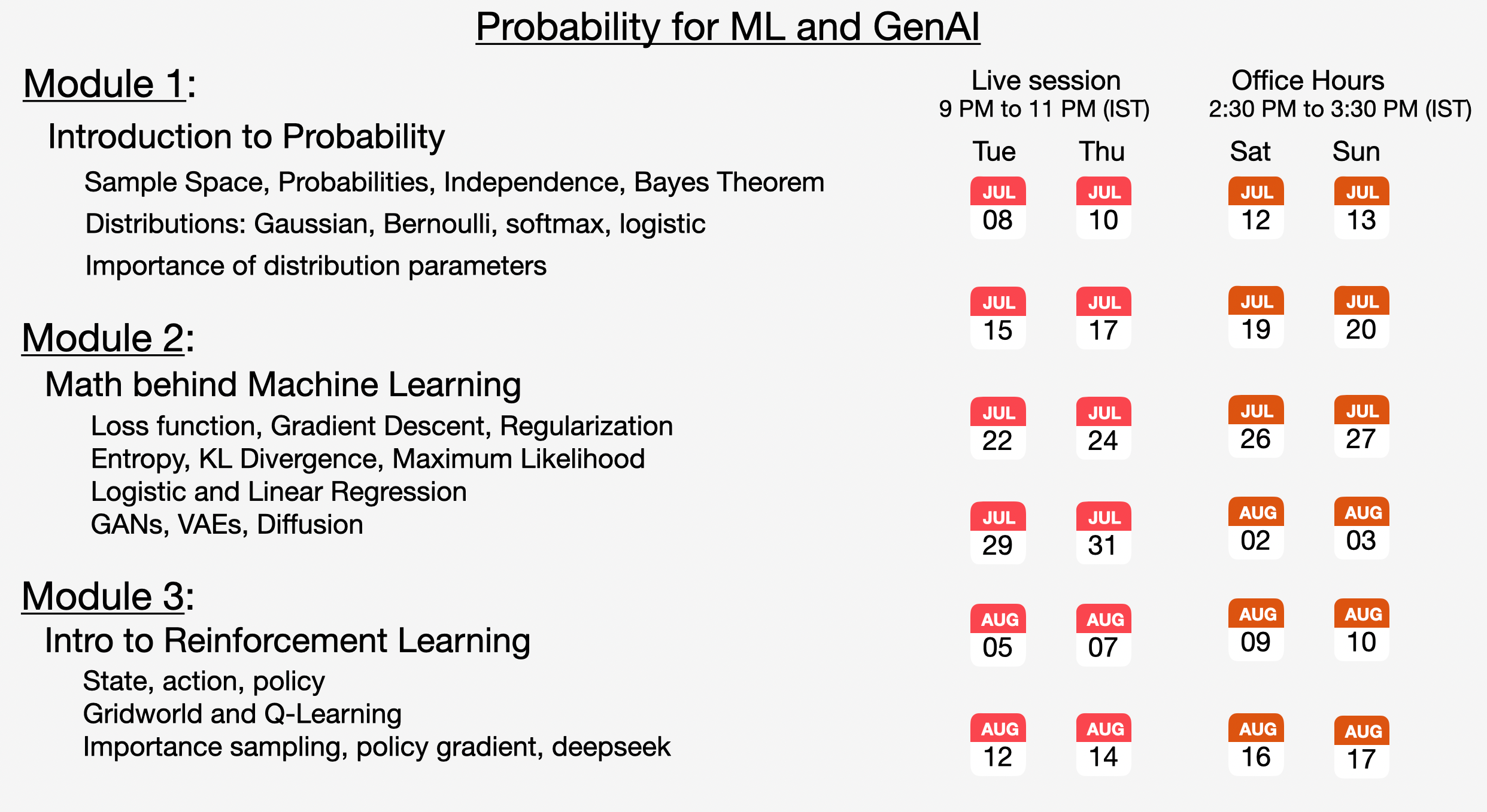
This is a small segment of our course “Probability for ML and GenAI”
The Environment - Gridworld#
GridWorld is a simple 2D grid-based environment where an agent moves around trying to reach certain goal states while avoiding negative outcomes. Think of it like a board game where you’re trying to reach treasure chests while avoiding traps, but the agent learns the optimal path through trial and error rather than being explicitly programmed.
The Implementation#
Here’s a complete Python implementation of a GridWorld environment:
class GridWorld:
def __init__(self):
self.grid_size = (5, 8)
self.terminal_rewards = {
(0, 3): 3,
(1, 5): 20,
(4, 2): -10
}
self.actions = ["up", "down", "left", "right"]
self.action_effects = {
"up": (-1, 0),
"down": (1, 0),
"left": (0, -1),
"right": (0, 1),
}
self.start_pos = (2, 0)
self.current_pos = self.start_pos
def reset(self):
self.current_pos = self.start_pos
return self.current_pos
def is_valid_position(self, pos):
row, col = pos
return 0 <= row < self.grid_size[0] and 0 <= col < self.grid_size[1]
def step(self, action):
if action not in self.actions:
raise ValueError(f"Invalid action: {action}")
delta = self.action_effects[action]
next_pos = (self.current_pos[0] + delta[0], self.current_pos[1] + delta[1])
if not self.is_valid_position(next_pos):
next_pos = self.current_pos
self.current_pos = next_pos
reward = self.terminal_rewards.get(self.current_pos, 0)
done = self.current_pos in self.terminal_rewards
return self.current_pos, reward, done
Join the upcoming live cohort where we explain these concepts in great detail:
Example#
The environment is a 5×8 grid (5 rows, 8 columns)
States are represented as (row, column) coordinates.
The agent starts at position (2, 0), which is the middle-left of the grid.
Three special positions act as terminal states where episodes end:
(0, 3): Small positive reward of +3
(1, 5): Large positive reward of +20 (the “treasure”)
(4, 2): Negative reward of -10 (the “trap”)
The agent can perform four actions: up, down, left, and right.
Up: Move one row up (-1, 0)
Down: Move one row down (+1, 0)
Left: Move one column left (0, -1)
Right: Move one column right (0, +1)
If the agent tries to move outside the grid boundaries, it simply stays in its current position. This prevents the agent from “falling off” the world.
How It Works#
The environment follows the standard reinforcement learning interface:
Initialization: Set up the grid, define terminal states, and place the agent at the starting position
Reset: Return the agent to the starting position for a new episode
Step: Execute an action, update the agent’s position, calculate rewards, and determine if the episode is complete
Each call to step() returns three important pieces of information:
New Position: Where the agent ended up after the action
Reward: The immediate reward received (0 for most positions, positive/negative for terminal states)
Done: Boolean indicating whether the episode has ended
The Agent - Q-Learning#
Now that we understand the GridWorld environment, let’s explore how to create an intelligent agent that can learn to navigate it optimally. This agent uses Q-Learning, one of the most fundamental reinforcement learning algorithms, to discover the best actions to take in each state.
The agent builds what is called a Q-table, that is, a table that maps every state-action pair to an expected future reward.
Agent Implementation#
Here’s a complete implementation of a Q-Learning agent designed to work with our GridWorld:
class Agent:
def __init__(self, env):
self.grid_size = env.grid_size
self.actions = env.actions
self.learning_rate = 0.05 # α
self.discount_factor = 0.9 # γ
self.epsilon = 0.1 # ε
self.q_table = self.initialize_q_table()
def initialize_q_table(self):
q_table = {}
for row in range(self.grid_size[0]):
for col in range(self.grid_size[1]):
q_vals = {action: 0.0 for action in self.actions}
q_table[(row, col)] = q_vals
return q_table
def choose_action(self, state):
if random.random() < self.epsilon:
return random.choice(self.actions)
return self.get_best_action(state)
def get_best_action(self, state):
q_values = self.q_table.get(state)
best_action = random.choice(
[action
for action, q_val in q_values.items()
if q_val == max(q_values.values())]
)
return best_action
def update_q_table(self, state, action, reward, next_state):
"""
Q(s,a) -> Q(s,a) + α [r + γ * max(Q(s',a')) - Q(s,a)]
"""
current_q = self.q_table[state][action]
next_q_values = self.q_table.get(next_state)
max_next_q = max(next_q_values.values())
new_q = current_q + self.learning_rate * (
reward + self.discount_factor * max_next_q - current_q
)
self.q_table[state][action] = new_q
Understanding the Key Components#
The agent uses three crucial hyperparameters that control how it learns:
Learning Rate (α = 0.05): This determines how much the agent updates its Q-values with each new experience. A smaller value means the agent learns more conservatively, incorporating new information slowly. A larger value makes the agent adapt quickly but might cause instability.
Discount Factor (γ = 0.9): This represents how much the agent values future rewards compared to immediate ones. A value of 0.9 means future rewards are worth 90% of their face value, encouraging the agent to consider long-term consequences rather than just immediate gains.
Epsilon (ε = 0.1): This controls the exploration-exploitation trade-off. With ε = 0.1, the agent will explore (take random actions) 10% of the time and exploit (take the best known action) 90% of the time.
The Q-table is the heart of the agent’s knowledge. It’s a comprehensive map that stores the expected future reward for taking each possible action in each possible state. Initially, all Q-values start at zero, representing the agent’s complete ignorance about the environment.
For our 5×8 GridWorld with 4 actions, the Q-table contains 160 entries (40 states × 4 actions). Each entry represents the agent’s current best estimate of how good it is to take a specific action from a specific position.
The choose_action method implements an epsilon-greedy strategy, one of the most common approaches to the exploration-exploitation dilemma:
Exploration (ε of the time): The agent chooses a completely random action, potentially discovering new strategies or better paths
Exploitation (1-ε of the time): The agent chooses what it currently believes is the best action based on its Q-table
This balance is crucial because pure exploitation would cause the agent to get stuck in suboptimal strategies, while pure exploration would prevent it from using what it has learned.
The update_q_table method implements the core Q-Learning update rule, often called the Bellman equation for Q-Learning:
This equation updates the Q-value based on:
Current Q-value: What the agent currently thinks about this state-action pair
Immediate reward (r): What reward was actually received
Future potential (γ × max(Q(s’,a’))): The discounted maximum Q-value of the next state
Learning rate (α): How much to adjust based on this new experience
How the Agent Learns#
The learning process follows this cycle:
Observe the current state
Choose an action using epsilon-greedy strategy
Execute the action in the environment
Receive reward and observe the new state
Update the Q-table based on the experience
Repeat until the episode ends
Over many episodes, the Q-values converge to represent the true expected returns for each state-action pair, allowing the agent to make increasingly optimal decisions.
For a lot more insights, join our live cohort.
📅 CALENDAR